"Sistem kendali AI baru ini adalah salah satu pengendali robot lunak umum pertama yang dapat mencapai ketiga aspek kunci yang dibutuhkan agar robot lunak dapat digunakan dalam masyarakat dan berbagai industri," kata Profesor Madya Zhiqiang Tang, yang merupakan Rekan Pascasarjana di M3S dan di NUS, dalam keterangan tertulis (5/2/2026).
SMART dan NUS Kembangkan Sistem Kendali untuk Soft Robots
Intinya Sih
Robot lunak terbuat dari material fleksibel dan sulit dikendalikan karena bentuknya yang lentur.
Lingkungan dunia nyata penuh gangguan tak terduga yang dapat mengacaukan gerakan robot lunak.
Sistem kendali AI baru memungkinkan robot lunak beradaptasi terhadap beragam tugas dan gangguan.
Mengandalkan dua jenis “sinapsis” yang bekerja secara saling melengkapi.
Disclaimer: This was created using Artificial Intelligence (AI)
Is this "Intinya Sih" helpful?
Singapore-MIT Alliance for Research and Technology (SMART) bersama National University of Singapore (NUS) baru saja mengembangkan sistem kendali berbasis kecerdasan buatan yang dirancang khusus untuk robot lunak (soft robots).
Sistem ini memungkinkan lengan robot lunak mempelajari beragam gerakan dan tugas hanya sekali, lalu menyesuaikannya secara fleksibel ke situasi baru tanpa perlu pelatihan ulang atau kehilangan fungsinya.
Terobosan ini membawa robotika lunak semakin dekat ke tingkat adaptabilitas mirip manusia. Hal ini membuka peluang besar untuk aplikasi dunia nyata seperti robot asistif, robot rehabilitasi, hingga perangkat medis dan wearable berbahan lunak yang lebih cerdas, serbaguna, dan aman.
1. Robot lunak sulit untuk dikendalikan
Berbeda dengan robot konvensional yang bergerak menggunakan motor dan sambungan kaku, robot lunak (soft robots) dibuat dari material fleksibel seperti karet lembut dan digerakkan oleh aktuator khusus. Komponen ini berfungsi layaknya otot buatan untuk menghasilkan gerakan fisik.
Fleksibilitas ini membuat robot lunak sangat cocok untuk tugas-tugas yang membutuhkan sentuhan halus atau kemampuan beradaptasi tinggi. Namun, justru karena sifatnya yang lentur, bentuk robot dapat berubah-ubah secara tidak terduga, sehingga pengendaliannya menjadi jauh lebih kompleks.
Lingkungan dunia nyata pun penuh gangguan tak terduga. Perubahan kecil seperti pergeseran beban, hembusan angin, atau gangguan ringan pada perangkat keras dapat mengacaukan gerakan robot lunak. Meski riset di bidang ini telah berkembang pesat, pendekatan yang ada umumnya masih sangat terbatas.
2. Blue print untuk Robot Lunak
Dalam studi berjudul “A general soft robotic controller inspired by neuronal structural and plastic synapses that adapts to diverse arms, tasks, and perturbations” yang dipublikasikan di Science Advances, para peneliti memperkenalkan sistem kendali AI baru yang memungkinkan robot lunak beradaptasi terhadap beragam tugas dan gangguan.
Pendekatan ini terinspirasi dari cara otak manusia belajar dan menyesuaikan diri, serta dibangun di atas riset mendalam tentang kendali robot berbasis pembelajaran, embodied intelligence, robotika lunak, dan meta-learning.
Sistem ini mengandalkan dua jenis “sinapsis” yang bekerja secara saling melengkapi. “Sinapsis struktural” dilatih secara offline menggunakan berbagai gerakan dasar, seperti menekuk atau meregangkan lengan robot dengan halus.
Sementara itu, “sinapsis plastis” terus diperbarui secara online saat robot beroperasi, menyempurnakan gerakan sesuai kondisi aktual di lapangan.
3. Tahan dari gangguan ekstrem
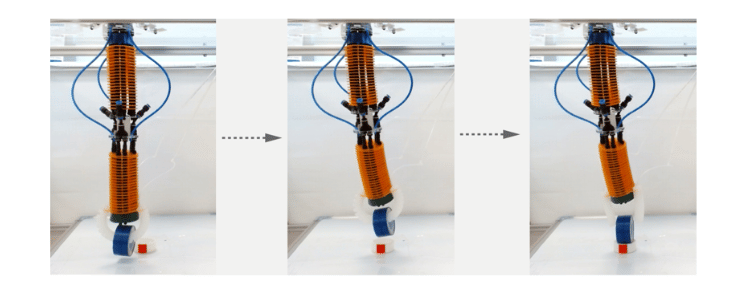
Sistem kendali ini dirancang untuk menangani berbagai jenis tugas. Lengan robot lunak bisa melakukan trajectory tracking (mengikuti jalur gerak tertentu), penempatan objek secara presisi, hingga pengaturan bentuk seluruh tubuh robot (whole-body shape regulation).
Tak hanya itu, metode ini juga mampu digeneralisasi ke berbagai platform lengan robot lunak yang berbeda, menunjukkan bahwa pendekatan tersebut tidak terbatas pada satu desain atau perangkat tertentu.
Dalam pengujian eksperimental, sistem ini divalidasi pada dua platform fisik berbeda. Ini termasuk lengan robot lunak berbasis kabel (cable-driven soft arm) dan lengan robot lunak berbasis paduan memori bentuk (shape-memory-alloy–actuated soft arm).
Hasilnya, sistem mampu mengurangi kesalahan pelacakan gerak hingga 44–55% di bawah gangguan berat, mempertahankan akurasi bentuk lebih dari 92% saat terjadi perubahan beban.
Temuan ini menjadi langkah penting menuju robot lunak yang tidak hanya fleksibel secara fisik, tetapi juga cerdas secara adaptif. Dengan meniru cara kerja sinapsis di otak manusia, para peneliti membuka jalan bagi generasi baru robot yang mampu belajar, menyesuaikan diri, dan tetap aman di tengah ketidakpastian dunia nyata.